









Elephant Robotics MyArm 300 Pi
Description
MyArm 300 Pi 2023: braț robotic colaborativ cu 7 axe
Cel mai portabil braț robotic de birou cu 7 axe
Echipat cu Raspberry Pi 4B, împreună cu sistemul de operare Ubuntu Mate 20.04 personalizat de Elephant Robotics, myArm 300 Pi oferă o experiență similară cu cea a unui PC. Nu este nevoie de un PC extern pentru control; conectați un monitor, o tastatură și un mouse pentru utilizare ușoară. Ideal pentru educație în robotică, învățarea logicii controlului, aplicații cu roboți și cursuri de simulare ROS. Un asistent perfect pentru învățarea și aplicarea brațului robotic cu 7 axe.
Parametri
- Raza de lucru: 300 mm
- Raspberry Pi
- Suport pentru cameră
- Control prin aplicație
- Tragere și predare (drag & teach)
- Control cu joystick
- ROS1
- ROS2
- myBlockly
- GPIO
- ROS
- Învățare practică
- Python
Configurație avansată
Configurația robustă a produsului satisface nevoile dvs. de dezvoltare: interacțiune cu butoane, afișaj pe ecran, buzzer, interfață I/O. Orice vă trece prin minte poate fi dezvoltat.
- Control de bază ESP32
- Raspberry Pi4B
- HDMI x 2
- USB x 4
- Matrice LED 5 x 5
- I/O x 40
- Servomotor de înaltă performanță x 7
- PVM-Tool-I/O x 3
- Grove x 1
- RJ45 x 1
Cercetare educațională
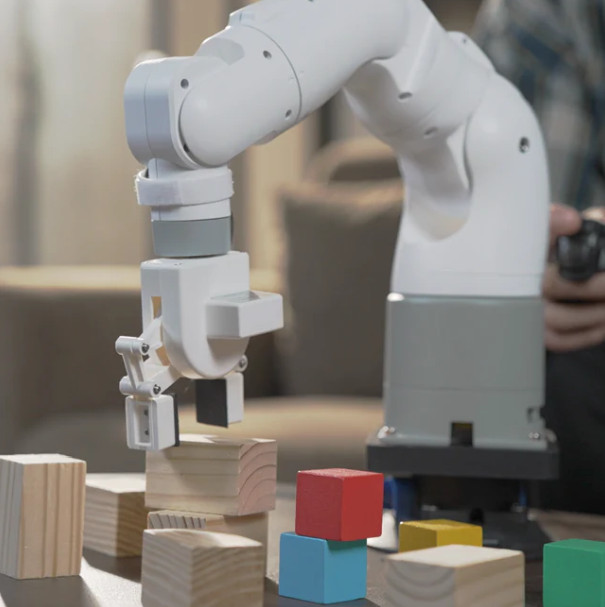
myArm oferă 7 grade de libertate, depășind roboții cu 6 axe, permițând mișcări la fel de flexibile ca un braț uman. Cu interfețe încorporate, susține schimbări avansate de poziție ale articulației cotului. Ideal pentru predarea practică în cercetarea poziției roboților, planificarea traseului mișcării, gestionarea redundanței, cinematică, dezvoltare ROS, dezvoltarea aplicațiilor cu roboți, programare și procesare a datelor.
Dezvoltare creativă
Robotul myArm este proiectat să fie 100% compatibil cu accesorii myCobot, asigurând o adaptabilitate perfectă în instalarea structurii și controlul softului, ceea ce extinde scenariile de aplicații pentru robotul myArm. Cu interfețe hard pentru Raspberry Pi 4B și M5Atom aproape 100% deschise, utilizatorii îl pot asocia cu accesorii personale Raspberry Pi 4B și M5Atom pentru dezvoltări personalizate.
Explorare în afaceri
Brațul robotic myArm susține integrarea cu alte mașini de nivel superior, inclusiv PC-uri, terminale de control industrial și șasiuri mobile AGV, adecvate pentru diverse scenarii de aplicații. Susține mai multe metode de control al conexiunilor, atât prin cablu, cât și fără fir, satisfăcând nevoile unor proiecte complexe. Împreună cu diferite terminale, myArm poate fi utilizat în diverse scenarii, cum ar fi afișarea de modele de aplicații cu roboți, afișarea de kituri educaționale, afișarea de aplicații industriale 4.0 și afișarea de aplicații cu roboți compuși.
Sistem de operare personalizat pentru roboți
Sistemul dezvoltat pe parcursul a trei ani oferă o experiență aproape de cea a unui PC. Sistemul myArm are medii încorporate precum ROS1/2 și Python dar include și soft de dezvoltare pentru roboți precum VSCode, VNC și SSH. Nu sunt necesare configurări complicate. De asemenea, oferă soft de actualizare automatizată, susținând actualizări cu un singur clic pentru mediul de dezvoltare corespunzător. Simplificarea procesului face aplicațiile cu roboți mai ușoare.
Programare ușoară a roboților
Oferă myBlockly, un soft de vizualizare pentru începători, bazat pe programare drag-and-drop. Cu programarea bazată pe blocuri și instrumentele grafice de depanare, chiar și începătorii pot controla ușor brațul robotic. Mediul de dezvoltare Python 2/3 suportă diverse biblioteci de drivere precum OpenCV, QT și pymycobot. Satisface nevoi avansate de dezvoltare în controlul roboților, recunoașterea imaginilor și dezvoltare frontend.
Asistență pentru controlul simulării ROS
Oferă asistență pentru mai multe versiuni ale ROS1 și ROS2. Cu suport constant pentru extensii în toate versiunile, furnizează cazuri demonstrative RVIZ și MOVEIT sub diferite versiuni, satisfăcând nevoile de dezvoltare în profunzime ale utilizatorilor.
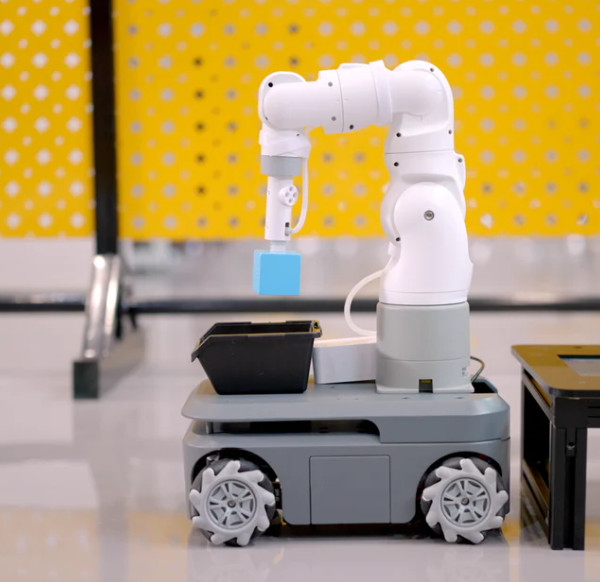
Combinație myAGV + myARM
Combinație de șasiu mobil + dezvoltare a brațului robotic. Începeți proiecte cu roboți colaborativi la un cost redus, inclusiv cartografiere SLAM, navigație autonomă, mediu de dezvoltare ROS, controlul robotului colaborativ cu 7 axe, recunoașterea vizuală și comunicarea între dispozitive.
Accesorii versatile
Zeci de accesorii precum clești adaptivi, flanșe pentru cameră și ventuze pentru a vă ajuta să vă eliberați pe deplin ideile creative cu myCobot.
myStudio
myStudio este o platformă completă pentru myCobot. Principalele funcții ale myStudio includ:
- Actualizarea firmware-ului;
- Furnizarea de tutoriale video despre utilizarea robotului;
- Furnizarea de informații despre mentenanță și reparații (cum ar fi tutoriale video, întrebări și răspunsuri, etc.).
Această platformă oferă un singur loc unde utilizatorii pot accesa toate resursele necesare pentru actualizarea, învățarea și menținerea robotului myCobot în condiții optime de funcționare.
Date tehnice
|
Grade de libertate (DOF) |
7 |
|
Raza de lucru (mm) |
300 |
|
Încărcătură (g) |
200 |
|
Precizie de poziționare (mm) |
± 0.5 |
|
Durată de viață în funcțiune (h) |
500 |
|
Aspect |
Structură integrată învelită complet |
|
Interfață de alimentare INTRARE |
DC 12V5A |
|
Control principal |
Raspberry Pi 4B 4G |
|
CPU de bază |
Broadcom BCM2711, 64bit 1.5GHz 4Core |
|
GPU de bază |
500 MHz VideoCore VI |
|
Memorie de bază |
4 GB 64-bit LPDDR4 25.6 GB/s |
|
Port de rețea de bază |
x 1 |
|
Bluetooth de bază |
2,4G/5G |
|
Wireless de bază |
802.11ac |
|
Interfață video de bază |
microHDMI x 2 |
|
Interfață audio |
port 3,5mm |
|
Port de intrare (INTRARE) |
2,3,4,5,6,7,9,11,12,13,16,17,18,19,20,21,22,23,24,25,26,27 |
|
Port de ieșire (IEȘIRE) |
Partajat cu intrarea |
|
Tip de control auxiliar |
ESP32 x 2 |
|
Nucleu de control auxiliar |
240MHz dual core 600 DMIPS, 520KB SRAM Wi-Fi, Bluetooth dual mode |
|
Flash pentru nucleul de control auxiliar |
4MB |
|
I/O de extensie pentru control auxiliar |
G19,G21,G22,G23,G25,G33 |
|
USB |
USB 3.0 x 2; USB 2.0 x 2 |
|
Poziție fixă a orificiilor |
Lego + șuruburi |
|
Raspberry Pi |
Oglindă oficială |
|
PICO |
V1.0 |
|
ATOM |
V1.0 |
|
Mișcare liberă |
Acceptată |
|
Mișcare a articulațiilor |
Acceptată |
|
Mișcare carteziană |
Acceptată |
|
Înregistrare traseu |
Acceptată |
|
Control wireless |
Acceptat |
|
Windows |
Acceptat |
|
Linux |
Acceptat |
|
ROS 1 |
Acceptat |
|
Python |
Acceptat |
|
JS |
Acceptat |
|
myBlockly |
Acceptat |
|
myStudio |
Acceptat |
|
Protocol de control port serial |
Acceptat |
|
TCP/IP |
Acceptat |
|
MODBUS |
Acceptat |
Einzelheiten
Empfohlene Produkte
-
 Elephant Robotics MechArm 270 Pi5.445,00 RON
Elephant Robotics MechArm 270 Pi5.445,00 RON -
Elephant Robotics MyBuddy 280 Pi14.229,60 RON
-
Elephant Robotics MyCobot 320 Pi21.344,40 RON


